Tras 2 horas y 37 minutos de descenso, el 26 de marzo de 2012, el director de cine James Cameron alcanzaba el fondo de la fosa Challenger, en las proximidades de las Islas Marianas, a una profundidad de 10.908 metros, convirtiéndose en el primer hombre en descender en solitario a esa profundidad.
Para qué sirve.
Un DSV (del inglés deep-sumerge vehicle, vehículo para grandes profundidades) es un submarino tripulado autopropulsado capaz de sumergirse a grandes profundidades. Existen dos clases principales de DSVs, los de exploración y reconocimiento, y los de rescate, también conocidos como DSRVs (del inglés deep submergence rescue vehicle, vehículo de rescate a grandes profundidades).

El DSRV-2 Avalon de la U.S. Navy
Un poco de historia.
El 23 de enero de 1960, el batiscafo Trieste, construido en Italia bajo el diseño de Auguste Piccard y tripulado por su propio hijo Jacques Piccard y Don Walsh, fue el primer submarino tripulado en alcanzar el fondo de la fosa Challenger, en las Marianas, a una profundidad récord de 10.911 metros, en una inmersión que formaba parte del Proyecto Nekton.
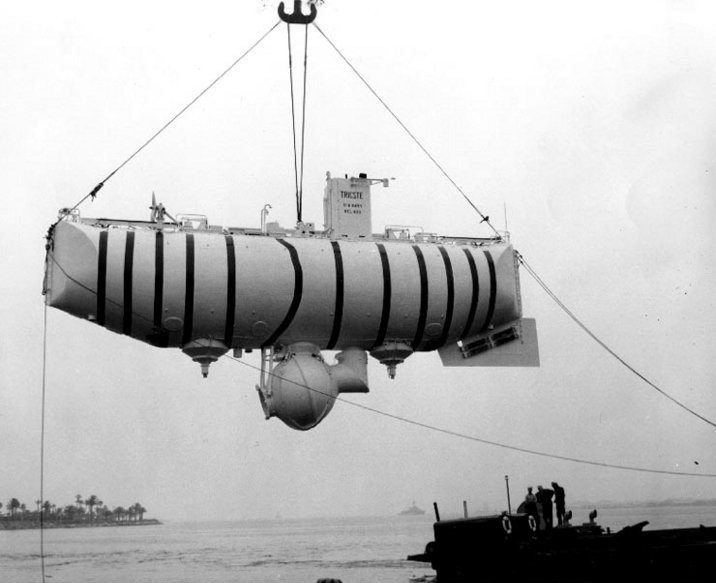
El Trieste fue definido por los Piccard como un batiscafo, una esfera que alojaba a la tripulación más una cámara de flotabilidad rellena de gasolina, con capacidad para navegar por si mismo, frente a las anteriores batisferas, esferas de acero selladas herméticamente con una mirilla de observación en cristal reforzado, que pendían de un barco mediante un cable también de metal, que las proveían de electricidad, telecomunicaciones y aire.

Para soportar las enormes presiones a las profundidades de la fosa Challenger, la esfera del Trieste tenía un espesor de casi 13 centímetros, y en su interior apenas cabían dos personas. Su descenso le llevó 4 horas y 47 minutos, y una vez en el fondo sus tripulantes observaron el entorno durante veinte minutos antes de regresar a la superficice, en una subida de 3 horas y 15 minutos.
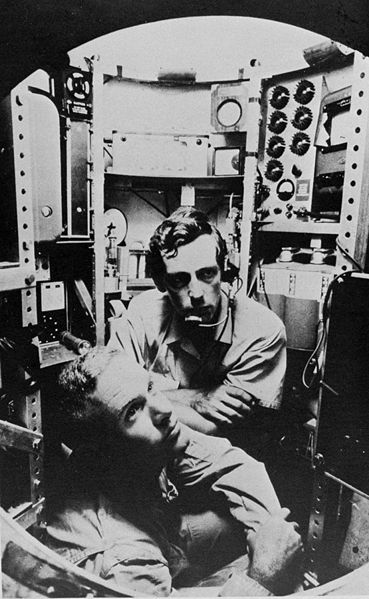
Piccard y Walsh en el interior del Trieste.
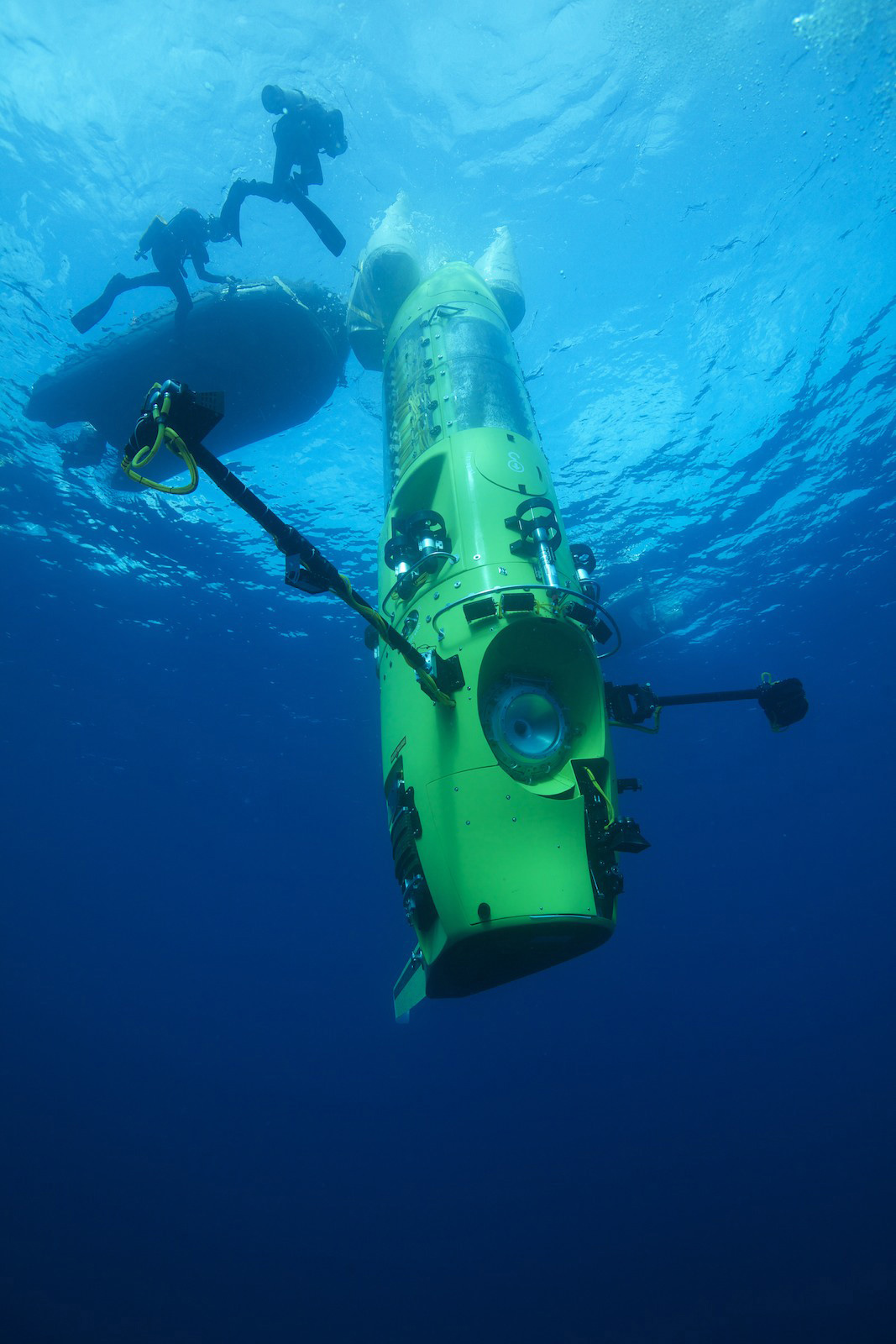
El DeepSea Challenger.
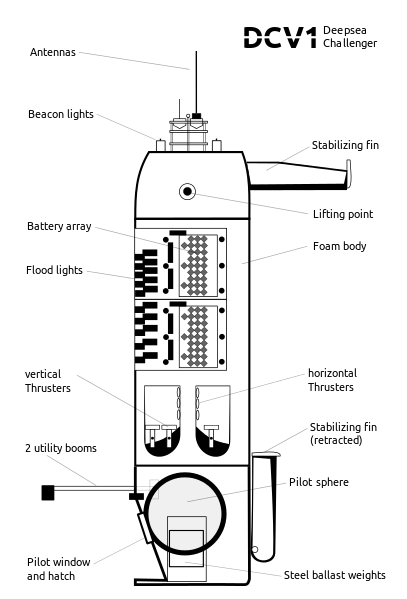
El DeepSea Challenger (DCV 1) es un sumergible de grandes profundidades, construido en Australia por la compañía Acheron Project en el año 2011, con la intención de llevar a James Cameron a la fosa Challenger, el punto más profundo de la Tierra. En sus poco más de 7 metros de longitud el submarino porta un gran número de equipos para la toma de muestras e imágenes del fondo marino.
Es el fruto de siete años de trabajos de diseño, planificación, construcción y pruebas. Los objetivos que se marcaron Cameron y los ingenieros participantes en el proyecto eran los siguientes:
- Construir un vehículo capaz de transportar a una persona al punto más profundo del océano y permitirle desarrollar actividades de investigación allí durante un largo periodo de tiempo.
- Demostrar que se puede descender varias veces al mismo lugar para la recogida de muestras, datos e imágenes.
- Demostrar la viabilidad de un vehículo operado por una persona como plataforma científica en lo más profundo del océano.
- Demostrar que vehículos pilotados, a control remoto o automatizados pueden trabajar en conjunto en una gran variedad de tareas científicas.
- Ser capaces de recoger el máximo de datos científicos el la primera expedición.
- Traer desde el fondo una gran cantidad de imágenes y vídeos que inspiren el interés general por la exploración y el estudio científico de las profundidades.
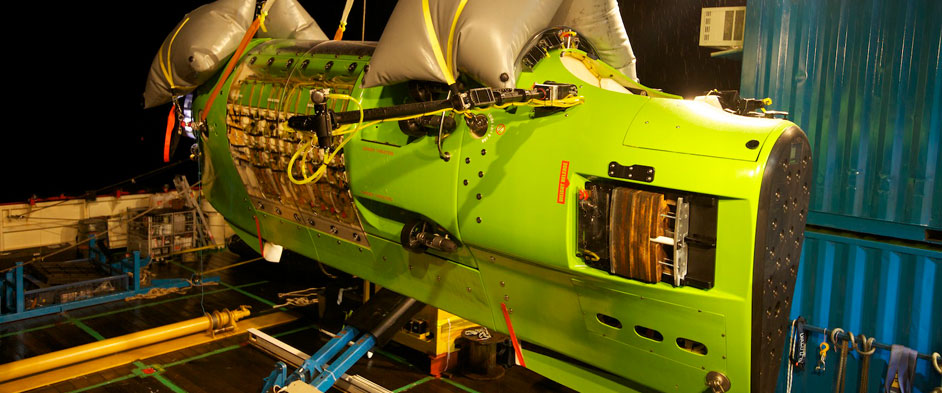
Para la construcción del DeepSea Challenger, el ingeniero australiano Ron Allum tuvo que hacer frente a un gran número de desafios, como la creación de nuevos materiales, propulsores adaptados a altas presiones, nuevas luces y tipos de cámaras o cables de comunicaciones que permiten la trasmisión del sonido a través del casco del sumergible. Gran parte de la experiencia acumulada por Allum viene de sus experiencias anteriores con Cameron en la filmación de los documentales sobre el Titanic o el Bismark.
Uno de los nuevos materiales creados para el proyecto es una espuma sintáctica llamada Isofloat, capaz de soportar enormes presiones. Construir el casco del DeepSea Challenger con esta espuma le permitió a los ingenieros incorporar los propulsores dentro de la espuma sin utilizar un armazón de acero.
La espuma también alberga las baterías de litio que alimentan los equipos y los más de 180 sistemas a bordo del sumergible, desde los propulsores o el soporte vital a las cámaras 3D o las luces LED.
La esfera para el piloto es de 1,1 metros de diámetro, con un espesor de 64 mm, y tiene capacidad para solo un tripulante, al que provee con oxígeno, calor, y mantiene a salvo de las grandes presiones. Pero el espacio es tan reducido que el piloto lleva sus piernas encogidas todo el rato y apenas puede mover los brazos.
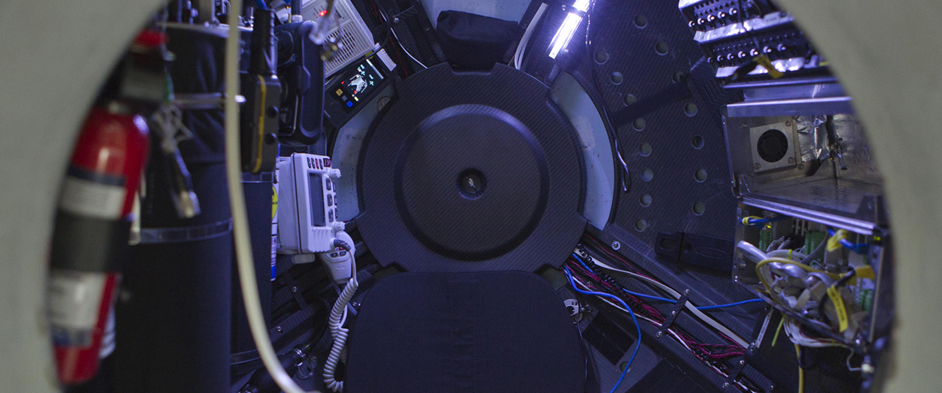
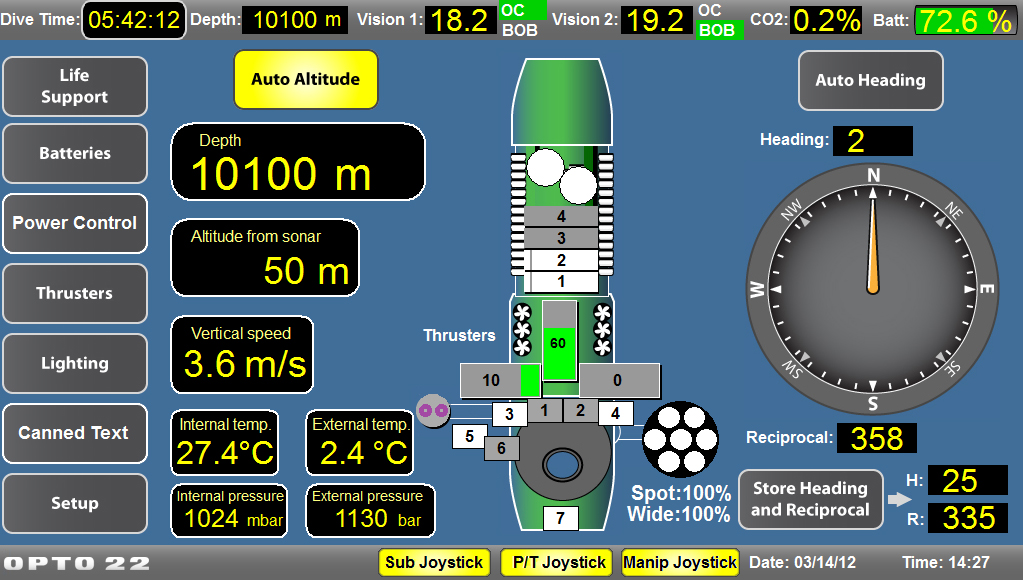
Debajo del asiento del piloto se encuentran las baterías de emergencia. A la derecha del piloto están los compartimentos de tratamiento de aire, y a su izquierda el tablero de mandos. En frente tiene una pantalla que proyecta imágenes del exterior, mientras que una pantalla táctil le sirve para monitorizar los sistemas del sumergible. Además en el interior de la esfera hay comida, agua y los mandos de los propulsores.
El submarino está equipado con botellas de oxígeno suficiente para 56 horas, mientras que el CO2 se elimina mediante unos scrubbers. El vapor de agua de la respiración y el sudor del piloto que se condensa en la superficie de la esfera es recogido en una bolsa para ser utilizado como bebida en caso de emergencia, utilizando una pajita especial diseñada para filtrar los contaminantes.
El sumergible pesa casi 12 toneladas, y porta 500 kg de lastre sólido que le ayudan a sumergirse, y del que se libera por electromagnetismo para retornar a la superficie. Este sistema cuenta hasta con 5 sistemas distintos de respaldo en caso de fallo.
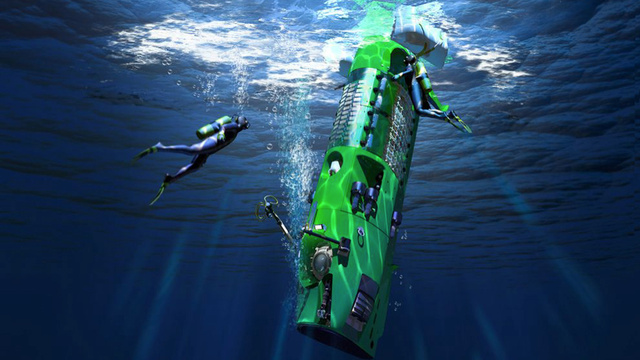
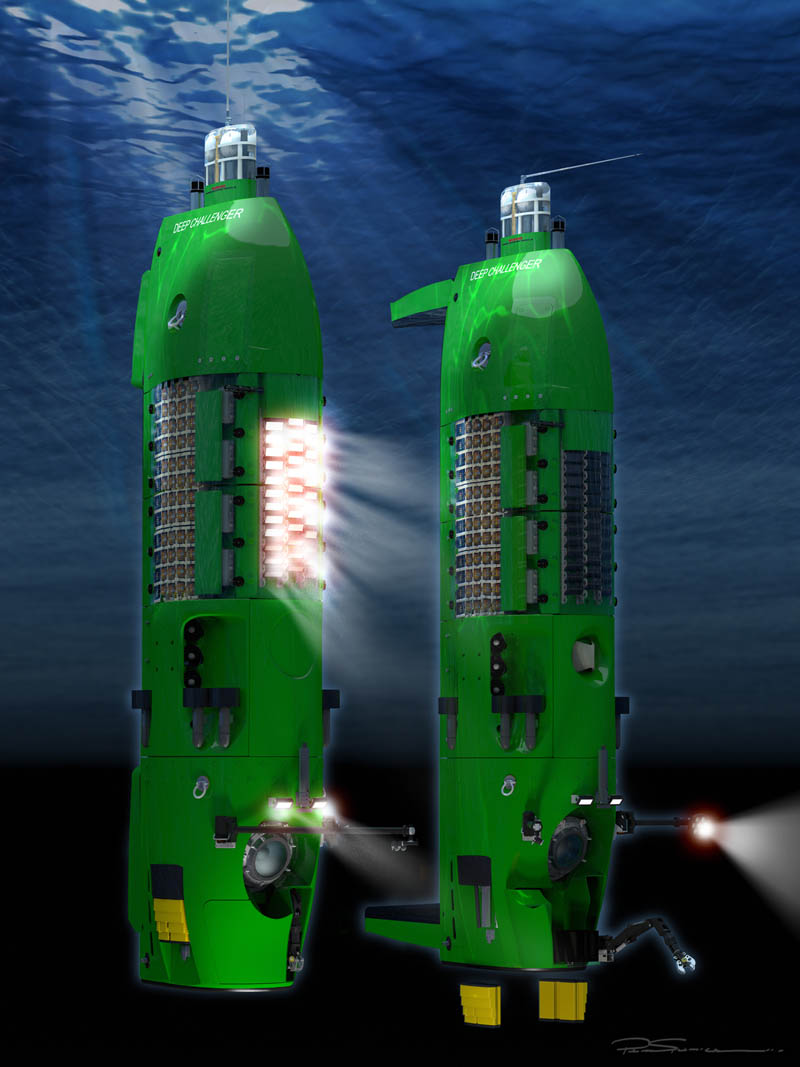
Mientras que el diseño tradicional de este tipo de embarcaciones es horizontal, el DeepSea Challenger está diseñado a lo largo de un eje vertical, lo que favorece su desplazamiento a través del agua. Una vez en el fondo, el submarino se propulsa mediante 12 propulsores que le permiten alcanzar una velocidad de 3 nudos horizontalmente y de 2,5 nudos verticalemente.
El sumergible está equipado con un brazo hidráulico para la toma de muestras y con cuatro cámaras exteriores para la captura de imágenes del entorno y de la fauna. El submarino también cuenta con otros dos brazos, uno equipado con un foco de luz y el otro con una cámara 3D. El panel de luces LED montado en la parte frontal de la nave asegura una buena iluminación del fondo.
Además, un vehículo auxiliar denominado lander desciende junto al submarino para recoger especímenes e imágenes. Durante la expedición el piloto puede grabar un cuaderno de bitácora en vídeo 3D, y comunicarse con la superficie por voz o por mensajes de texto.
El DeepSea Challenger está diseñado para ser seguro, de forma que todos los sistemas críticos del sumergible tienen varios sistemas de respaldo por si algo falla, desde el soporte vital hasta el mecanismo que libera el lastre en el fondo. Cada cierto tiempo el sumergible envía automáticamente lecturas de presión, temperatura, niveles de oxígeno, etc. a la superficie que son revisados en el buque nodriza. En caso de emergencia, el submarino podría ascender en solo una hora a la superficie.
Una vez que el submarino asciende a la superficie, el buque nodriza cuenta con varios sistemas para localizarlo. El sistema acústico de navegación le permite conocer la posición exacta del DeepSea Challenger, y en caso de fallo, dos potentes luces LED de emergencia, visibles de noche desde varias millas de distancia, señalan la posición de la nave. Además, dos sistemas de radiobalizas señalan la posición del sumergible, una por satélite y la otra por radio VHF.
Aunque el DeepSea Challenger no batió el record de profundidad del Trieste por muy poco, descendiendo hasta los 10.898 metros, si superó ampliamente el tiempo en el fondo de la fosa, pasando tres horas en las que tomó muestras y realizó grabaciones en tres dimensiones, y además su piloto, James Cameron, fue el primero en hacerlo en solitario.

Características generales.
Eslora: 7,3 metros
Desplazamiento: 11,8 toneladass
Velocidad: 3 nudos
Autonomía: 56 horas
Máxima profundidad alcanzada: 11.000 met
Tripulación: 1
Para saber más:
– Página web del DeepSea Challenge, y perfiles en Twitter y Facebook.
– James Cameron cuenta lo que vió en el fondo del océano, en ABC.
– Ocean Exploration: Timeline, en la web de National Geographic.
– Deepest Dive: Geographic Honors Voyage to the Bottom of the Sea, en la web de National Geographic.
– El Deepsea Challenge en la revista Ocean, News & Technology (pdf).
Fuentes gráficas: deepseanews.com deep-submersible-pilots-association.org en.wikipedia.org deepseachallenge.comUn artículo de Juan A Oliveira




Interesante artículo. Sabía de los descensos de Cameron para hacer documentales del Titanic, pero no a la fosa Challenger (vale, tampoco conocía dicha fosa).
Me gustaMe gusta
Se ve que después de Abyss la fascinación por Cameron por el fondo del mar fue en aumento.
Un saludo.
Juan
Me gustaMe gusta
ES MUY INTERESANTE EL MEJOR QUE HE VISTO EN CASTELLANO
EN INGLÉS SON MEJORES
Me gustaLe gusta a 1 persona
Suele haber grandes artículos en inglés sobre temas navales, sobre todo por el gran volumen que se genera en internet en ese idioma. En español tanto la página web de Atmosferis como la de Fieras de la ingeniería también tienen grandes aportes.
Muchas gracias por tu comentario y un saludo.
Juan
Me gustaMe gusta
INFORMACIÓN BASTANTE BASTANTE EXPLÍCITA
Me gustaMe gusta
MEJOR LOS QUE ESTÁN EN INGLÉS PERO ESTE ESTÁ BIEN
Me gustaLe gusta a 1 persona
Gracias!
Un saludo.
Juan
Me gustaMe gusta
Pingback: El futurismo marino de Arthur Radebaugh en “Closer than we think!” | VA DE BARCOS
De que material esta echo y que espesores tienen las paredes de este submarinos?
Me gustaMe gusta