
Por primera vez un velero robótico ha cruzado el Atlántico, consiguiendo de esta manera completar el desafío Microtransat, prueba consiste en diseñar y construir un velero robótico (menor de 4 metros de eslora) capaz de cruzar el océano Atlántico por sus propios medios, esto es, sin interacción humana. El protagonista de la hazaña es el SB Met de la compañía noruega Offshore Sensing AS, que alcanzó la meta en la costa irlandesa el 26 de agosto, dos meses y medio después de zarpar de Terranova, según datos preliminares.
El desafío Microtransat
Lanzado en 2005 por los doctores Mark Neal de la Universidad de Aberystwyth (Gales) e Yves Briere del Institut Supérieur de l’Aéronautique et de l’Espace (ISAE) de Toulouse (Francia), el desafío nacía con el ánimo de estimular el desarrollo de este tipo de embarcaciones a través de la competición amistosa. Desde entonces, varios equipos de diversas localizaciones se han enfrentado al reto, aunque ninguno lo había conseguido hasta este año.
Los veleros robóticos
Las características clave de un velero robótico pueden resumirse en:
- Su único medio de propulsión es el viento
- No se controla a distancia; todo el sistema de control está a bordo
- Es completamente autosuficiente en términos de energía
Basándonos en esto, podemos definir un velero robótico como el que es capaz de navegar hacia un destino programado sin control o intervención humana, de una manera segura y fiable. Para ello tiene que ser capaz de reconocer un origen y un destino, y adaptarse continuamente a los cambios climatológicos que se producen a su alrededor, evitando además colisiones con otras embarcaciones, y todo ello mediante su programación informática.
Esta programación se centra en un par de servomecanismos que manejan el barco: uno sobre el timón, para corregir el rumbo de la embarcación (en base a unos “waypoints” de destino previamente seleccionados), y otro sobre la vela, para poder colocarla en la mejor posición frente al viento. Estos actuadores toman sus decisiones en función de la información obtenida por los sensores instalados en el velero (el GPS que le indica su posición, la brújula que le indica su dirección y el anemómetro que le indica la fuerza y dirección del viento).
Cruzando el Atlántico
Las embarcaciones que toman parte en el desafío pueden partir de donde quieran siempre que en su recorrido atraviesen una de las líneas de partida marcadas por los organizadores (ver las imágenes). Su navegación debe ser autónoma desde 40 millas náuticas antes de atravesar esa línea, y los equipos deben indicar un punto de la línea de llegada que será su objetivo. El margen de error para llegar a ese punto es de un radio de 25 kilómetros.
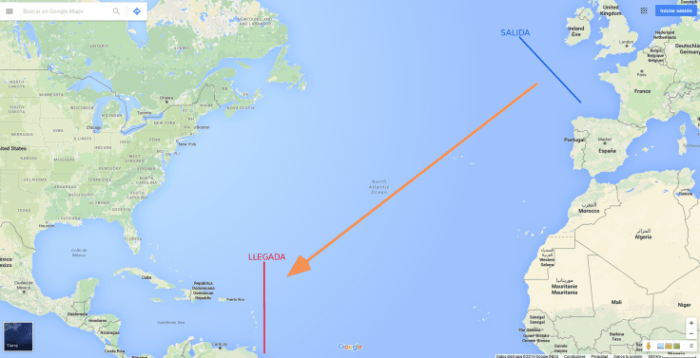
Ruta original este-oeste (desde el suroeste de las islas británicas hasta el noreste de Venezuela)

Ruta oeste-este (incorporada en 2013, desde el este de Nueva Escocia hasta el oeste de las islas británicas, y que ha realizado el velero ganador)
Las normas de la competición obligan a las embarcaciones a informar de su posición cada seis horas, y para ello van equipadas con sistemas de comunicación vía satélite. La energía que mantiene en funcionamiento tanto estos sistemas de comunicación como los sensores y actuadores del barco se obtiene mediante paneles solares, o va almacenada en baterías instaladas a bordo.
Las embarcaciones participantes pueden ser de dos tipos:
- Veleros robóticos de 4 metros de eslora máxima, cuya única forma de propulsión es el viento
- Embarcaciones de cualquier otro medio de propulsión, con una eslora máxima de 2 metros
Además, las embarcaciones se dividen en dos divisiones en función de su nivel de autonomía:
- Barcos completamente autónomos: no pueden recibir ningún mensaje que altere su rumbo y solamente pueden procesar información pública (tal como predicciones meteorológicas, observación de hielos o del Sistema de Identificación Automática AIS)
- División no tripulada: los barcos pueden recibir cualquier tipo de información, incluso si esta le hace cambiar el rumbo originalmente programado
Puedes consultar todas las normas de la competición en su web.
El velero robótico SB Met
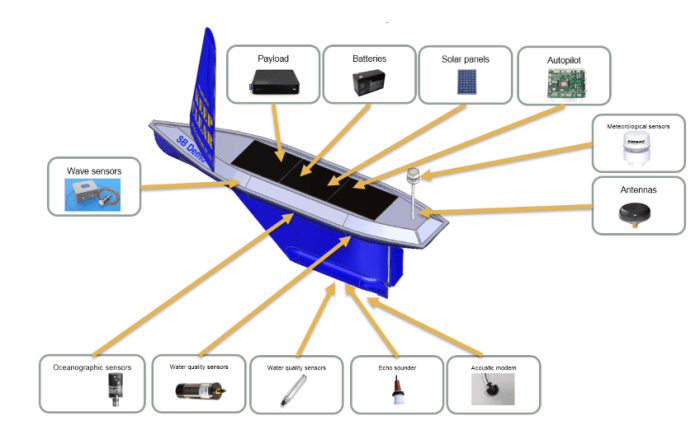
El SB Met es uno de los catorce Sailbuoys construidos por la empresa tecnológica noruega Offshore Sensing. El velero tiene la forma de una tabla de surf cubierta de paneles solares que alimentan sus equipos y coronada con una vela rígida en su proa. Con dos metros de eslora, su peso es de unos 60 kilogramos.
Los Sailbuoys están equipados con sensores para tomar mediciones de altura de olas, salinidad y niveles de oxígeno del agua, ecosondas y todos los otros equipos necesarios para realizar su navegación “no tripulada”, que le permite al operador cambiar su rumbo desde tierra durante el desafío.
Más de veinte intentos de completar el desafío Microtransat habían fracasado antes del éxito del SB Met, con los veleros atrapados por redes de pesca, recuperados del mar por barcos tripulados o directamente perdidos en el océano.
Ahora el desafío para los ganadores es volver a intentar el reto, pero “más rápido, más barato y con un velero más pequeño”.
Juan A Oliveira es el responsable de las Áreas de Ingeniería Naval Aplicada y Estructuras en CT Ingenieros. Desde 2013 edita y coordina el blog de temática naval vadebarcos.net. Puedes conectar con él a través de Twitter o LinkedIn.
Si te ha gustado la entrada, puedes recibir las nuevas entradas del blog en tu correo electrónico (busca cómo en la barra de la derecha). Además, puedes seguir toda la actualidad del mundo de los barcos en Twitter, o Flipboard.









