El barco autónomo USV Maxlimer acaba de completar con éxito una misión de 22 días en la costa suroeste de Inglaterra durante la cual escaneó 1.000 kilómetros cuadrados del fondo del océano Atlántico, mientras era supervisado vía satélite desde el centro de control de SEA-KIT en Tollesbury a 500 kilómetros de distancia, demostrando la utilidad de los buques robóticos no tripulados para este tipo de tareas.

Cuatro quintas partes del fondo marino todavía no han sido escaneadas con una resolución aceptable. Puesto en marcha en 2015, el galardón Shell Ocean Discovery XPRIZE, dotado con siete millones de dólares en premios, buscaba incentivar el desarrollo de tecnologías en el campo de la exploración oceánica de manera autónoma, rápida y en alta resolución con el fin de acelerar el conocimiento del fondo marino.
El GEBCO-NF Alumni, un equipo internacional dirigido por las doctoras Rochelle Wigley y Yulia Zarayskaya se llevó el primer premio, cuatro millones de dólares, gracias al escaneado de 278 kilómetros cuadrados del fondo del mediterráneo en tan solo 24 horas a finales de 2018, mediante un vehículo autónomo submarino transportado y desplegado desde el buque autónomo Maxlimer de SEA-KIT.

Construido en Essex (Inglaterra) por Hush Craft, el USV Maxlimer es un barco autónomo de 11,75 metros de eslora por 2,2 metros de manga. Fabricado en aluminio, el buque puede desplazarse a una velocidad máxima de 4 nudos y cuenta con una autonomía de 22.000 kilómetros gracias a su propulsión diésel eléctrica formada dos motores de 18 kW que alimentan dos propulsores azimutales de hélices de paso fijo de 400 mm de diámetro.
En palabras de Ben Simpson, el director general internacional de SEA-KIT, el Maxlimer es “casi como una furgoneta pick-up marina, robusta, adaptable y con gran autonomía”. Gracias a su capacidad de carga de 2,5 toneladas, el Maxlimer no solo puede transportar, desplegar y recuperar casi cualquier vehículo autónomo submarino, sino que también puede realizar tareas de investigación y supervisión por su cuenta gracias a su versatilidad.

Mientras se encuentra en puerto, el Maxlimer es operado a distancia mediante control remoto. Una vez que se hace a la mar, el sistema K-Mate desarrollado por Kongsberg Maritime hace las funciones de cerebro de la embarcación. El plan de la misión se carga en el K-Mate, y el buque simplemente sigue sus órdenes mientras transmite vía satélite al centro de control de SEA-KIT en Tollesbury imágenes de vídeo en tiempo real, imágenes térmicas y señales de radar. En caso de encontrar algún tipo de problema, el operador en tierra puede tomar el control del buque remotamente o actualizar el plan de misión introducido en el K-Mate.
Tras ganar el Shell Ocean Discovery XPRIZE en 2018, el Maxlimer se convirtió en el primer buque autónomo de transporte de mercancías en mayo de 2019, llevando cinco kilos de ostras a través del mar del Norte entre los puertos de West Mersea en Inglaterra y Ostende en Bélgica. En julio de ese mismo año, el buque fue utilizado para desplegar un AUV Hugin para la inspección de tuberías offshore en el mar del Norte, en una operación pionera al ser la primera vez que se realizaba supervisando a distancia un barco navegando más allá del horizonte.

La siguiente misión del Maxlimer debía llevar a este USV a cruzar el Atlántico a principios de 2020, marcando un hito al ser el primer buque autónomo en cruzar este océano, pero las restricciones impuestas por la COVID-19 obligaron a cancelar el viaje. En su lugar, el buque autónomo partió en julio desde Plymouth, en el suroeste de Inglaterra, en una misión de 22 días durante los cuales escaneó casi 1.000 kilómetros cuadrados del fondo marino de esa región inglesa que permanecían sin cartografiar en alta resolución.
Financiada en parte por la Agencia Espacial Europea, la misión contó también con el apoyo de Global Marine Group, Map the Gaps, Teledyne CARIS, Woods Hole Group y la Nippon Foundation-GEBCO Seabed 2030 Initiative. Otro de los socios fue Fugro, una de las empresas geotécnicas marinas más grandes del mundo. La multinacional ha anunciado recientemente un acuerdo con SEA-KIT para la compra de una flota de USVs para utilizarlos para tareas de supervisión en los sectores del oil & gas y la eólica marina.

Para SEA-KIT el futuro está claro: «Mantener a las personas fuera de peligro es uno de los principios rectores de este concepto«, en palabras de Ifor Bielecki, director ejecutivo de SEA-KIT. «En la industria offshore, donde la seguridad es lo más importante, la única forma de mitigar verdaderamente el riesgo de que alguien se haga daño es sacar a todas las personas del barco«. Además, «eliminar la necesidad de tripulación hará innecesaria la necesidad de una cocina, de transportar víveres y agua dulce, de instalar aire acondicionado o calefacción, reduciendo tanto el tamaño del barco como el impacto del mismo en el medio ambiente«.
El mayor problema es cumplir con el Reglamento Internacional para Prevenir Abordajes (COLREGS por sus iniciales en inglés), principalmente por la ausencia de contenido acerca de los buques autónomos en el propio reglamento. «La definición de COLREGS de mantener una vigilancia en todo momento podría ser problemática«, según Bielecki. El Maxlimer ha sido equipado con un conjunto de cámaras CCTV para abordar este punto, aunque cuantas más cámaras se utilizan más ancho de banda se consume.
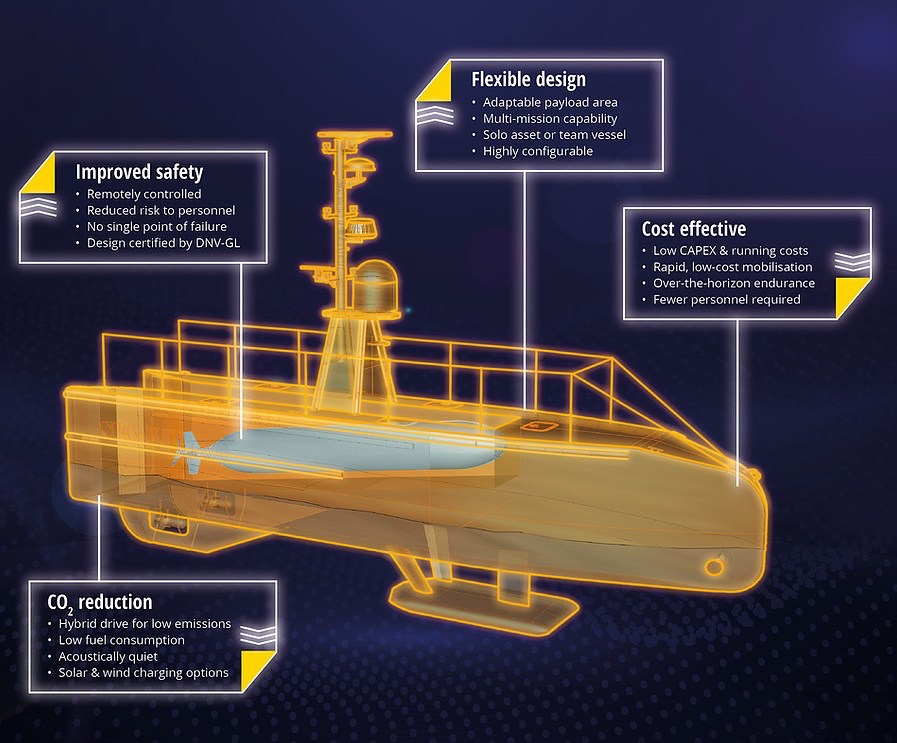
Desde su aparición, el Maxlimer y la familia de USVs de SEA-KIT han demostrado tanto su versatilidad, pudiendo ser utilizados para el despliegue de robots submarinos, la inspección de instalaciones offshore o el transporte de mercancías, como el ahorro económico y la reducción de la huella de carbono de la operación al eliminar la necesidad de tripulación. En el futuro cercano veremos más buques autónomos trabajando para las fuerzas del orden o los guardacostas vigilando nuestras costas, siendo utilizados en la lucha contra el fuego o en tareas de rescate, transportando mercancías cruzando el océano o limpiando nuestros puertos. La duda no es si esto será así, es cuándo será así. Y quizá sea antes de lo que pensamos.
También te puede interesar:



Juan A Oliveira es Ingeniero Técnico Naval por la Universidade da Coruña y MBA por la UNIR. Con más de 20 años de experiencia en el sector naval, desde 2013 edita y coordina el blog vadebarcos.net. Puedes conectar con él a través de LinkedIn.
Si te ha gustado la entrada, puedes recibir las nuevas entradas del blog en tu correo electrónico en el botón de abajo. Además, puedes seguir toda la actualidad del mundo de los barcos en el Flipboard de Vadebarcos.









